Introduction to Neural Networks
Multi-Disciplinary Optimization Course
2025-04-22
1.1 Neuron
A linear/non-linear function that takes in multiple inputs and produces one output.

\[ y = f\left( w_1\times x_1 + w_2\times x_2 + \dots + w_n \times x_n + w_0\right) \]
\[ y = f\left(\sum_{i=1}^n w_i x_i + w_0 \right) = f\left(\textbf{w}^T\textbf{x} + w_0\right) \]
1.3 Neural Network
Engineering problems will require functions with multiple outputs for a set of inputs
Example: 2D incompressible flow over flat plate. \(f_{NN}: x,y \to u,v,p\)
- for each blue neuron in hidden layer in the schematic, \(z_j = \textbf{w}^T_j\textbf{x} + w_{0,j},\;\; j=1,2,3,4; \; \; \textbf{x}=\{x,y\}^T\)
- In matrix form, it will be \[ \begin{bmatrix}z_1 \\ z_2 \\ z_3 \\ z_4\end{bmatrix} = \begin{bmatrix} \textbf{w}_1^T \\ \textbf{w}_2^T \\ \textbf{w}_3^T \\ \textbf{w}_4^T \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} + \begin{bmatrix} w_{0,1} \\ w_{0,2} \\ w_{0,3} \\ w_{0,4} \end{bmatrix} \] \[ \textbf{z} = \textbf{W}\textbf{x}+\textbf{b} \]

- \(\textbf{z},\textbf{b}\) are \((4\times 1)\) vector, \(\textbf{x}=\{x,y\}^T\) is \((2\times 1)\) input vector and \(\textbf{W}\) is \((4\times 2)\) weight matrix
1.5 Forward propagation
Lets take the same network having 1 hidden layer with 4 neurons and 1 output layer with 3 neurons
- foward propagation - process of passing input data through network’s layers to compute final output
Hidden layer \[ \begin{align} \textbf{z}_h &= \textbf{W}_{hi}\textbf{x}+\textbf{b}_h \\ \textbf{a}_h &= f_h\left(\textbf{z}_h\right) \end{align} \]
Output layer \[ \begin{align} \textbf{z}_o &= \textbf{W}_{oh}\textbf{a}_h+\textbf{b}_o \\ \textbf{a}_o &= f_o\left(\textbf{z}_o\right) \end{align} \]
\(\textbf{a}_0 = \{u,v,p\}\) is the estimated vector of outputs from the network
2.3 Back-propagation
- It is the algorithm to compute gradients of loss function w.r.t. \(\textbf{W}^{(l)}\) and \(\textbf{b}^{(l)}\)
lets take same two layer network
equations for hidden layer is \[ \begin{align} \textbf{z}_h &= \textbf{W}_{hi}\textbf{x}+\textbf{b}_h \\ \textbf{a}_h &= f_h\left(\textbf{z}_h\right) \end{align} \]
equation for output layer is \[ \begin{align} \textbf{z}_o &= \textbf{W}_{oh}\textbf{a}_h+\textbf{b}_o \\ \textbf{a}_o &= f_o\left(\textbf{z}_o\right) \end{align} \]
- combining them by substitution to get single equation of our network \[ \textbf{a}_o = f_{NN}(\textbf{x}) = f_o\left(\textbf{W}_{oh} \left( f_h\left(\textbf{W}_{hi}\textbf{x}+\textbf{b}_h\right)\right)+\textbf{b}_o\right) \]
2.4 Back-propagation
- combining them by substitution to get single equation of our network \[ \textbf{a}_o = f_{NN}(\textbf{x}) = f_o\left(\textbf{W}_{oh} \left( f_h\left(\textbf{W}_{hi}\textbf{x}+\textbf{b}_h\right)\right)+\textbf{b}_o\right) \]
- lets take simpler network with single neurons on each layer \[ {a}_o = f_{NN}({x}) = f_o\left({w}_{oh} \left( f_h\left({w}_{hi}{x}+{b}_h\right)\right)+{b}_o\right) \]

- Here, Neural network is a composite function.
- Lets take loss function as MSE, \(L_m=(u-a_o)^2\)
- For convenience, lets split the combined equation into individual layer equations \[ z_{h} = w_{hi}x+b_h, \ \ a_h = f_h(z_h) \\ z_{o} = w_{oh}a_h+b_o, \ \ a_o = f_o(z_o) \]
3.1 Data normalization
The process of scaling each input and output data to a fixed same range
In the same example network
Input variables are \(x\) and \(y\)
Outputs are \(u\), \(v\) and \(p\)
And lets say, we have \(N_{data}\) data points
- Normalization has to be performed individually for all the variables
- For example, normalization equation for \(x\) would be like \[ \bar{x} = \frac{x - min(x)}{max(x) - min(x)}, \ \ \bar{x} \in [0,1] \]
- Range of normalization will depend on the range of activation function
- Sigmoid function \(\in (0,1)\) and for hyperbolic tan function \(\in (-1,1)\)
3.4 Training the network
- It is the process of optimizing weights and biases of the neural network to model the target function

There are two fundamental optimization algorithms, others are derivatives from them
- Stochastic Gradient Descent
- Batch Gradient Descent
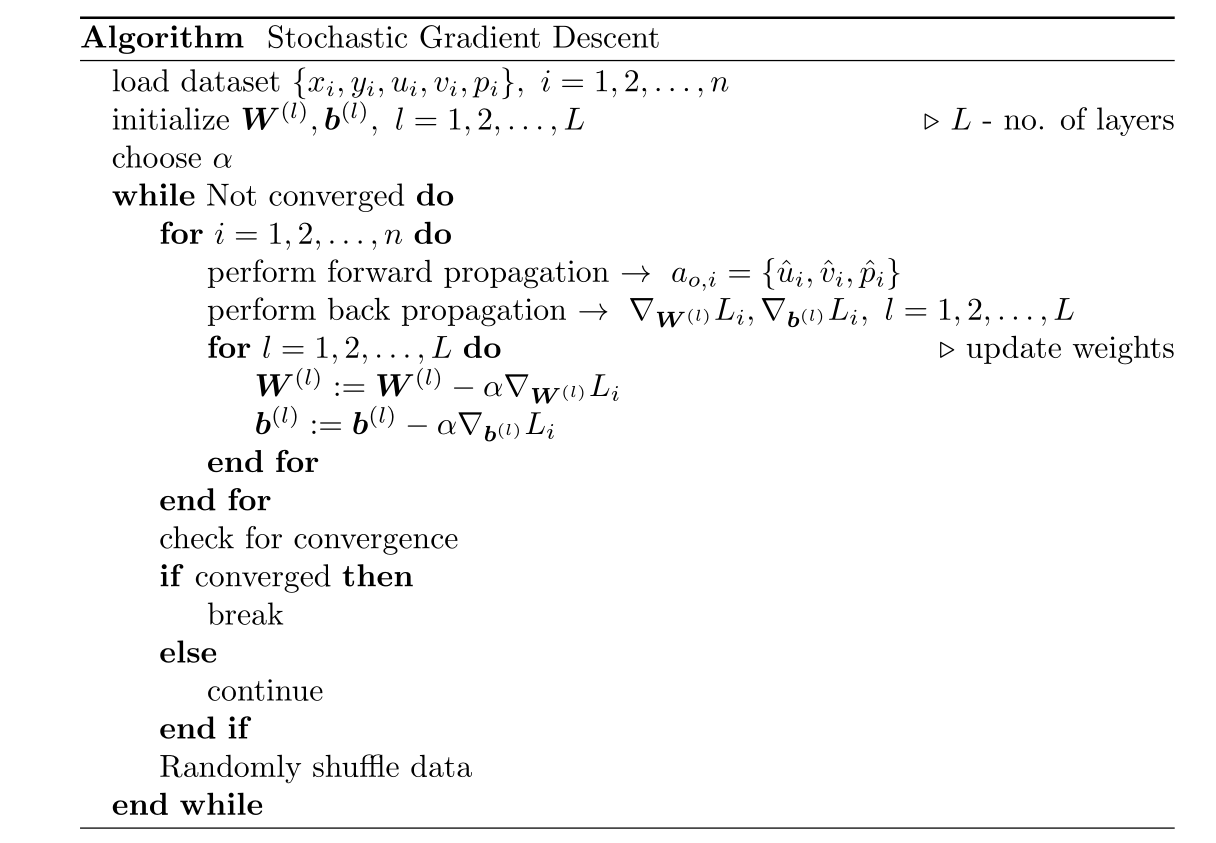
3.5 Optimiziation algorithms - Stochastic Gradient Descent
- In this algorithm, the weights will be updated for each record in the dataset
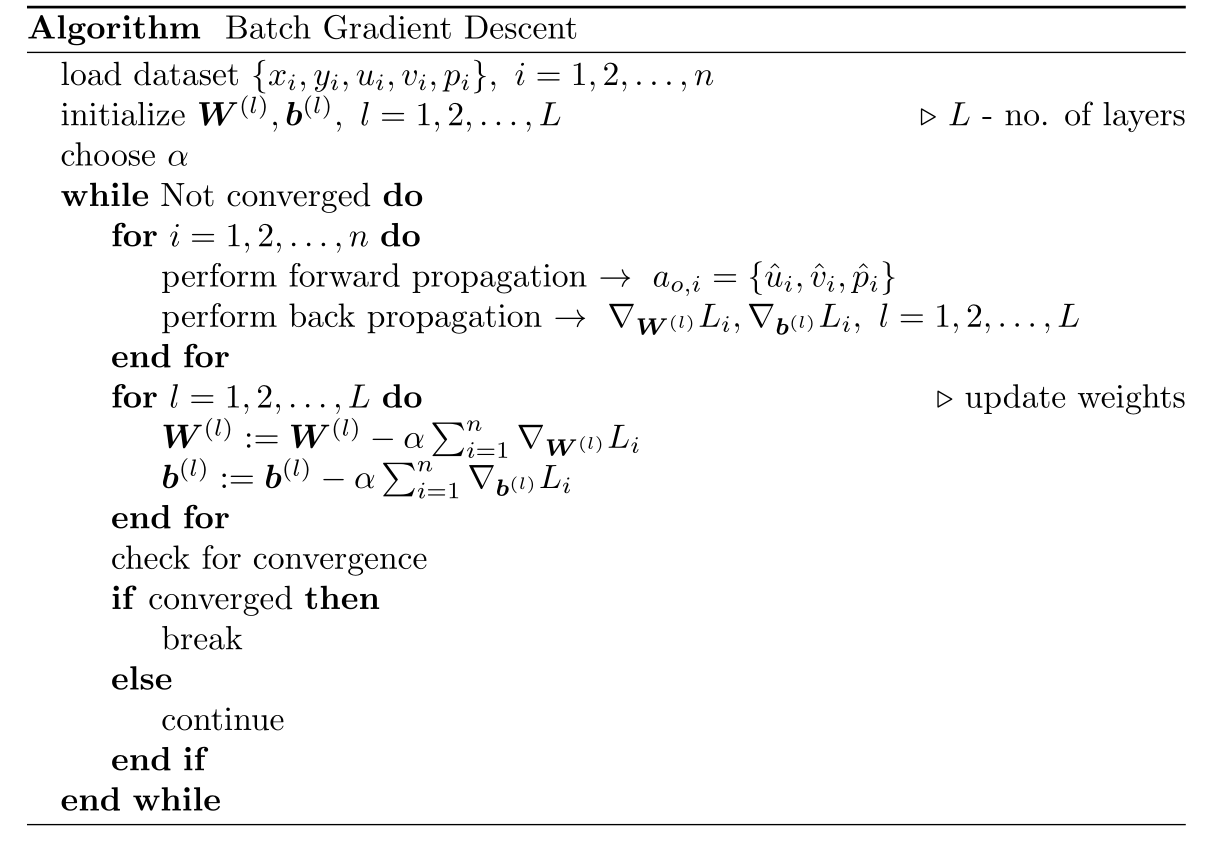
3.6 Optimization algorithms - Batch Gradient Descent
- In this algorithm, the weights will be updated after computing gradients for all the records in the dataset